Advanced Mechanical Systems
Complex kinematic design for Offshore & Radiation zones.
Role: Lead Design Engineer
Projects: Titan-Barrikady / 766 UPTK
Tools: CAD (SolidWorks/Kompas-3D), Kinematic Analysis
Project A: Motion-Compensated Gangway (Offshore)
Context: Developed a domestic alternative to the "Ampelmann" system for transferring personnel between ships and oil platforms in rough seas.
Contribution: Led the 3D modeling of the hydraulic hexapod platform. Developed the control logic flowchart for active wave compensation.
Outcome: Completed initial prototype design and kinematic verification.
Project B: Remote-Controlled Hazmat Robot
Context: Engineering a robotic platform for operations in high-radiation zones.
Contribution: Designed the internal component layout and calculated necessary lead/composite shielding thicknesses to protect sensitive electronics without exceeding weight limits.
Outcome: Delivered subsystem layouts for the master assembly.
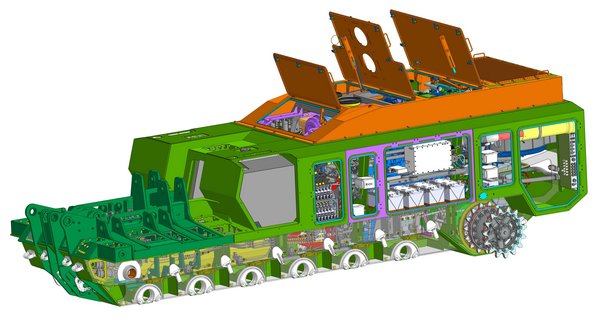
Fig 2. Internal component packaging & layout study (Work-in-Progress view shown for confidentiality).